Development of a Sensor Fault-Tolerant Module for High-Density EMG Pattern Recognition
Our Engineering Design Capstone Project
Now Published at the IEEE Engineering in Medicine and Biology Society Conference.
By Don Reynolds and Aashin Shazar
Advised By Dr. Xiaorong Zhang, PhD
Overview
The need to reject bad sensor data from EMG limb control systems is well-established. Sensors experiencing temporary faults lead to misclassified gestures which lowers the gesture recognition rate. Prior work by Zhang et al. rejecting faulty sensors from a low-density EMG array needs to be adapted to higher-density EMG arrays with many dozens (or hundreds) of sensors.1
High density EMG measurement have several advantages over low density EMG measurement.2 Placing more than one electrode on a muscle allows for sensor redundancy and a view into muscle unit activity. This provides a richer set of data to generate features from, with many muscle units being activated at different times by a single muscle. High density EMG technology shows clinical promise and it notes that EMG fault tolerant gesture recognition systems should be extended to include them.
The Problem
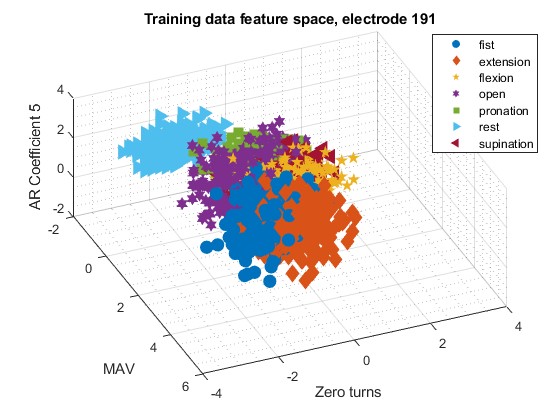
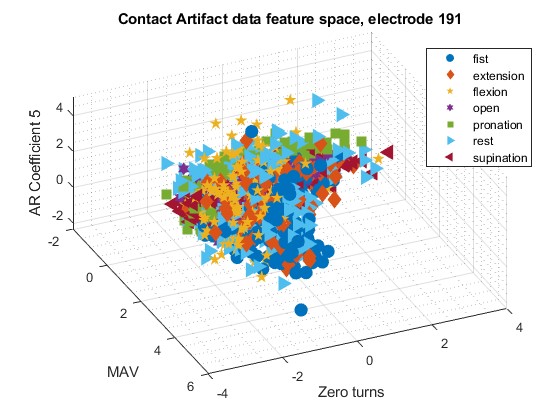
Signal faults such as 1) physical impacts to an EMG electrode array or 2) myoelectric sensors not contacting the skin can significantly degrade performance of machine learning classifiers generally. LDA is no exception. For example, artifacts contained in electrode 191 of our “Contact Artifact” dataset result from a pen striking the electrode array while a gesture is held. This brings the separation of classes from orderly to non-existent. The following plots focus only on this 191st electrode to show the need to remove this faulty sensor, which is in the area of the pen strike. Each shape represents features extracted from one window.
Note that there is orderly clustering of the seven gesture classes in the first figure. This is used as training data to place the linear discriminants. Note that the second figure has no such grouping; it contains data marred by a pen tapping on the electrode grid.
The Solution
To address these issues, Zhang et al. developed the original Sensor Fault-Tolerance Module (SFTM) that rejects faulty electrode data using a Linear Discriminant Analysis (LDA) classifier. By removing faulty sensors from the gesture classifier LDA covariance matrix and means (effectively retraining the classifier on the fly), it reduced the number of incorrect gesture classifications. A high level flow chart is seen in figure below. 3
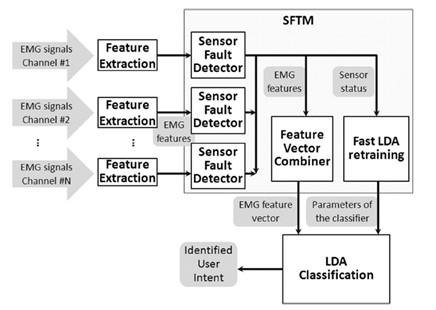
While prior effort employed low-density electrode arrays of six sensors, this high density application makes the use of three electrode array pads with a configuration of 8x8 sensors per pad. This results in a huge 192 electrode array configuration that allows for the investigation of SFTM in high density applications. To aid with research and development, PySFTM was developed which contains the focus of this project; a Python implementation of the SFTM algorithm in high density EMG applications.
The value of dense EMG sensor arrays is that they carry redundant information as larger muscles are broken down into smaller muscle units. Closely packed sensors will carry the same or similar voltage potential amplitudes with different phase, corresponding to neighboring muscle units’ activation as the larger muscle contracts. This redundancy allows for individual faulty sensors to be removed from the dense array without losing information. The separability of non-faulty sensor data enables the use of computationally efficient pattern classification schemes such as Linear Discriminant Analysis (LDA).
Below the PySFTM tool is used to analyze two adjacent windows where the rest gesture was performed. Data on the left presents a view where no fault is present, data on the right presents a view where the contact artifact fault is present, and the pen is striking the grid.
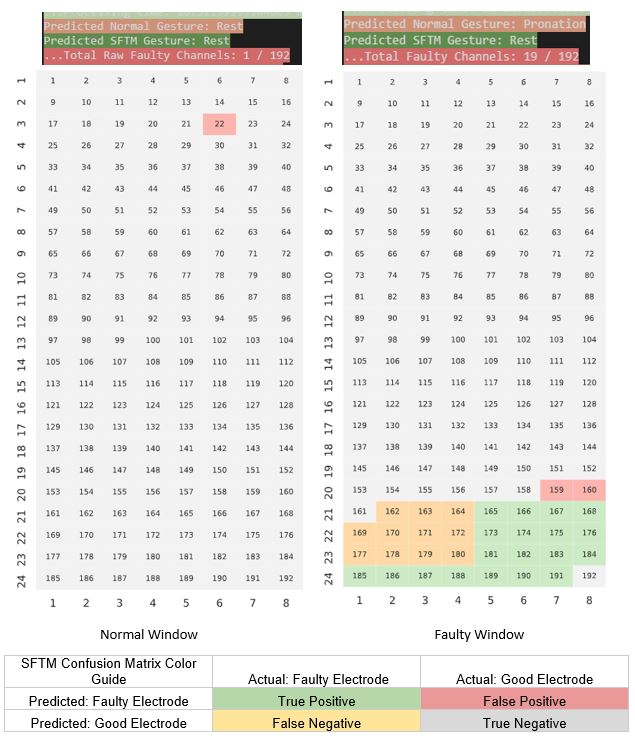
PySFTM classifies electrode 22 as faulty though there is no signal fault. Fortunately, removing electrode 22 in error does not affect the gesture classifier’s ability to return the correct gesture (rest).
Looking at the heatmap on the right, PySFTM identifies most of the faulty electrodes. Without removing these, the rest gesture is incorrectly identified as pronation. By removing the faulty electrodes, the gesture classifier can recover and provide the correct result. PySFTM still misses out on some of the other faulty electrodes and even identifies other electrodes as faulty. However, with the ones it did correctly find, it was able to recover the gesture successfully.
In essence, this is the true benefit of PySFTM. It is successfully able to overcome the limitations of the LDA classifier when met with signal faults by confidently recovering and predicting the gesture performed.